
Açıklama
MJS614P Üst Ekstremite Robotik Tedavi Sistemi
MJS614P Üst Ekstremite Robotik Tedavi Sistemiyle kol ağırlığını tamamen yok ederek robotik çalışma moduna geçebilirsiniz. Bu şekilde omuz ekleminin ağırlığı % 100 ortadan kaldırılarak hasta yüksüz ortamda algısal keşifin başlangıç seviyelerinde çalıştırılacaktır.
Karmaşıklığı nedeniyle, omuz eklemi rehabilitasyon dünyasını her zaman büyülemiştir. Kontrol ve Dengeden sorumlu serbest eklem aralığı ve kas-tendon yapısıyla ilgili olmasından dolayı vücudumuzun en karmaşık eklemidir.
Yukarıda belirtilenler ışığında genel olarak omuz ve üst ekstremite tedavi ve değerlendirmesi küresel bir rehabilitasyon düzenlemesi gerektirir.
Bu tanım, omuz ile ilgili mekanik sorunların yanı sıra neuroperseptif konuların dikkatli bir rehabilitasyon / ölçme ve değerlendirme yaklaşımı anlamına gelir. Çok Eklemli Sistem tam olarak bu nedenle geliştirilmiştir.
Sistem, hastanın kolunu üç boyutlu olarak hareket ettirmek için antropomorfik eksoskeleton bir robotik kol ile donatılmıştır.
Her eksen için ayrı çalışan üç farklı motor ile donatılmış MJS 614 sistemi üst ekstremitenin rehabilitasyonu ve ortopedik değerlendirilmesi için geliştirilmiştir
Hareket Özgürlüğü

Hastanın koluna paralel şekilde konumlandırılmış olan Çok Eklemli Sistem kolu, aslında sibernetik ilkelerine göre tasarlanmış çok hassas bir robotik koldur.
Dört “serbestlik” aralığına göre tasarlandığından bu mekanik kol üç boyutlu ortamda hastaya tam bir eklem hareket özgürlüğü sağlar. Yazılım Gerçek Zamanlı olarak her bir hareketi tespit eder.
Hasta, bilgisayar yazılımında önceden belirlenmiş yörüngeleri takip ederek en karmaşık eklem hareketlerini keşfederken; hareketler daha sonra referans değerleriyle karşılaştırma ve değerlendirme için kaydedilmiş olacak ve operatöre kişiye özel rehabilitasyon protokolleri oluşturmak için yardımcı olacaktır.
Kuvvet Kontrolü

Hareketin üç temel eksenin (Ön-Arka, Addüksiyon-Abdüksiyon, İç rotasyon-Dış rotasyon) aynı güç yoğunlukları ile kontrollü ve ayarlanabilir olması çok önemlidir. Omuzun ön-arka hareketinden sorumlu kaslar (Deltoid veya biseps brachii kası gibi), Adduksiyon-Abdüksiyon hareketinden sorumlu kaslara göre (örneğin büyük pektoralis) çok daha az bir kas kuvveti oluştururlar.
Bu nedenle, farklı kas bölgelerini doğru ayırt etmek ve spesifik kas bölgelerinde çalışmak için MJS üç adet birbirinden tamamen bağımsız çalışabilen güç kontrol ve ayar birimleri sunar. Bir ünite Ön-Arka hareketler, diğeri Adduksiyon Abdüksiyon hareketleri ve üçüncüsü de İç-Dış rotasyon için. Sistem, Motor egzersizlerinin kontrolünde herhangi bir ödün vermeden tüm hareketleri izleme olanağı sunar.
MJS’de üç eksenin (Ön-Arka, Addüksiyon-Abdüksiyon, İç rotasyon-Dış rotasyon) de uygulama güçlerini farklı dirençlerde ayarlayabilirsiniz.
İç- Dış Rotasyon

Sağlam bir denge için iç ve dış rotatif kas grubu arasındaki dengenin korunması gerekir. Sorunlu eklemi İç-Dış Rotasyon kontrol biriminden 90 derece bükerek bu narin kas bölgesini çok hassas ve çok küçük dereceli güç artışlarıyla çalıştırabilirsiniz.
Yazılım; Dinamik Hareket Ağırlığı, tekrar sayıları, açısal hızlar vb. birçok bilgiyi gerçek zamanlı ve görsel olarak gösterecektir.
Ağrısal Noktalar Tespit Sistemi
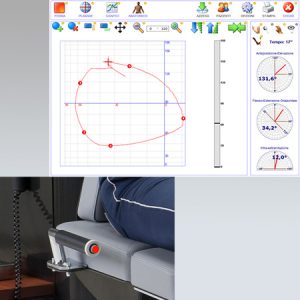
MJS sistemi patentli üç boyutlu ağrısal noktalar tespit sistemiyle donatılmıştır. Test Esnasında hasta ağrı hissettiği noktalarda butona basarken yazılım gerçek zamanlı olarak 3D ortamda noktaları kaydedecektir. Bir sonraki testte, hasta ağrı hissettiği noktalarda çalıştırılarak noktasal tedavi uygulanacak ve sorunlu eklem noktaları hızla rehabilite edilecektir.
Hareket Analiz ve EMG Modülü

Dünya’da omuz robotuyla hareket analizini birleştiren tek sistemdir. Hareket analizi sayesinde omuz robotundaki tedaviyi takiben hastanın tedavisine robottan bağımsız olarak kendi doğal ortamında devam edebilirsiniz. Entegre EMG modülüyle eklem hareketiyle kas aktivitesi senkronize olarak takip edilir.
MJS YAZILIMI
Proprioseptif Değerlendirme Modülü
Bu modül, kullanıcıya test edilen eklemin proprioseptif yeteneği hakkında hızlı bir tespit yapma imkanı sunar.
– Proprioseptif Çalışmalar
– İç-Dış Rotasyon
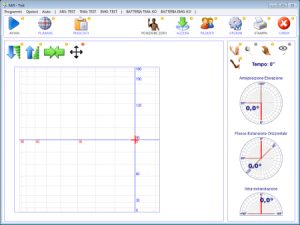
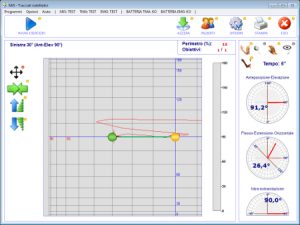
Dairesel ve Grafiksel Görüntüleme Modülü
Bu modül, eklem hareketini ön-arka ve sol-sağ eksenlerde görüntüleyerek detaylı analiz imkanı sunar. Aynı anda, hastanın gerçek zamanlı 3D anatomik görüntüsü ekranı yansıtılarak görsel feedback sağlar.
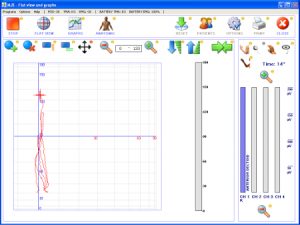
– Dairesel ve Grafiksel Hareket Görüntüleme ve detaylı analiz modülü
– Hazır Rehabilitasyon Protokolleri
– Rehabilitasyon Protokolleri Oluşturma Modülü
Rehabilitasyon Protokolleri Modülü
Bu modül eklem bölgesinde noktasal rehabilitasyon ve proprioseptif değerlendirme imkanı sunar. 100’den fazla hazır rehabilitasyon protokolleri ve sayısız alt protokollerle modül her türlü rehabilitasyon ihtiyacınızı karşılar.
– Hasta Tarihçesi ve Karşılaştırmalı Referans değerleri
Biofeedback Oyunlar
Hazır Oyunlar sayesinde çocuklarda egzersiz ve rehabilitasyon çalışmaları kolayca gerçekleştirilir.

Gündelik İşler ve İş Meşguliyet Modülü
4 farklı kategoride 25’den fazla İş meşguliyet Egzersizleri





İncelemeler
Henüz inceleme yapılmadı.